- I picked up the used car lift from Jäggi Autolift and unloaded it to the wood shed. A minor mishap was the placement of the wood planks to prevent the forklift from sinking in. It was quickly remedied with the help of my father-in-law. ;)






- The sponsoring stickers arrived and were mounted to the car by a good friend of mine:






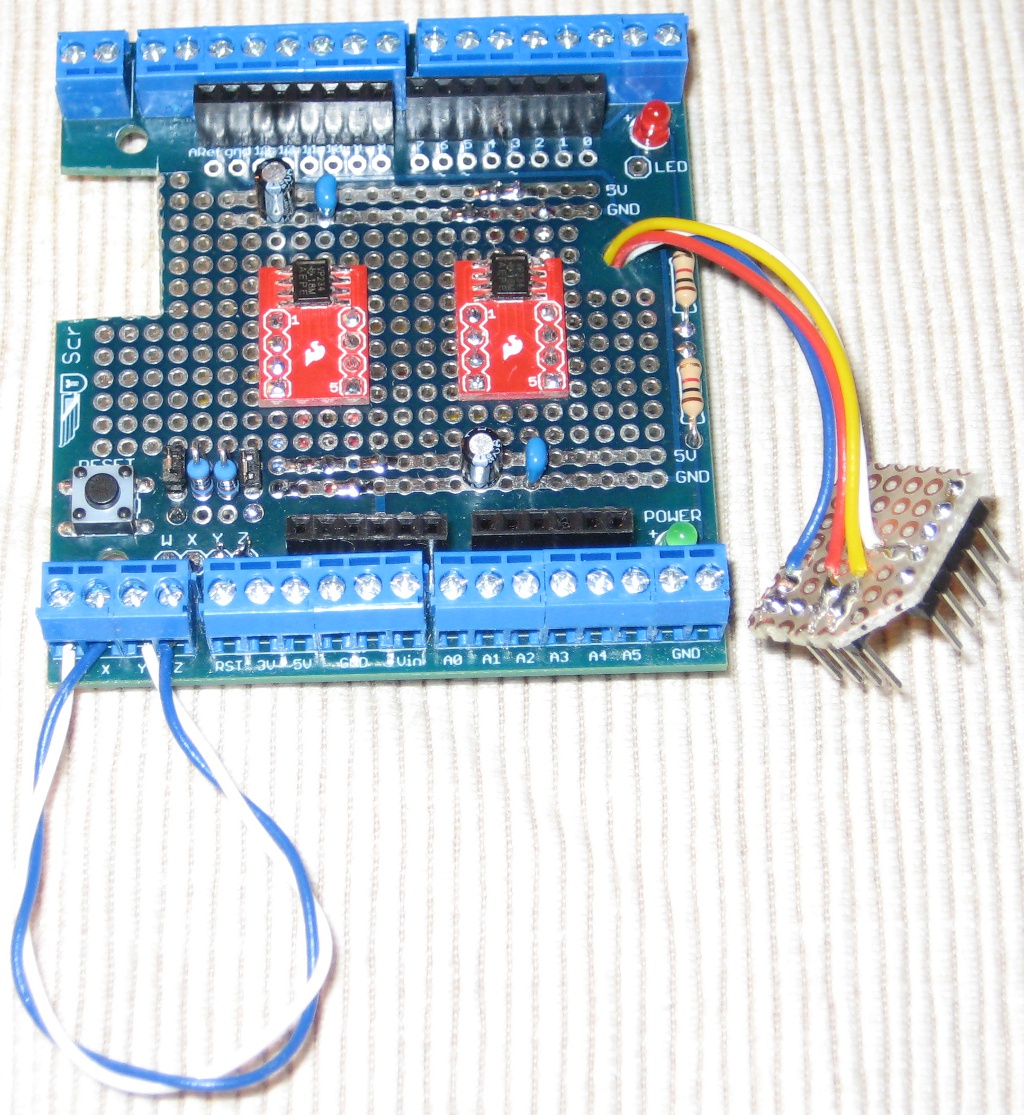
- I built myself a dual CAN shield for the Arduino Due as suggested in the Arduino Forum (I took the liberty to copy the working diagram). The dual CAN channels are ideal - one is going to be hooked up to the car's bus to request throttle position and the other builds a separate bus for the EV components. To make everything a bit more resistant to the harsh conditions of a car, I was "forced" to use to of this dreaded hot-glue - just to eliminate vibrations at the solder points of the wires (where they usually come lose first). BTW: I'm pretty proud at my first attempt in SMD soldering. It came out quite well - even without the help additional flux. After soldering until 03:00 in the morning, everything worked out fine in a first loopback test.


- I also started contributing to the GEVCU project. GEVCU stands for "General Electric Vehicle Control Unit". It's a project to use a Arduino Due or Machina as a controller for any electric car with a motor controller that requires messages on the CAN bus to start-up and receive control commands (e.g. the throttle position). The prime location for GEVCU based discussions is on Jack's Forum and the source master on github. (my fork can be found here). I'm currently implementing a webserver to display status information and configure the platform via webbrowser. Also the support for a CAN based throttle is something to start with the next days. Currently the platform only supports a (dual) potentiometer based throttle.